

Vytržené uchycovací matice

Deformace distančního držáku

Vytrhané matky z uchycení a deformovaný mezikus= vůle jako prase

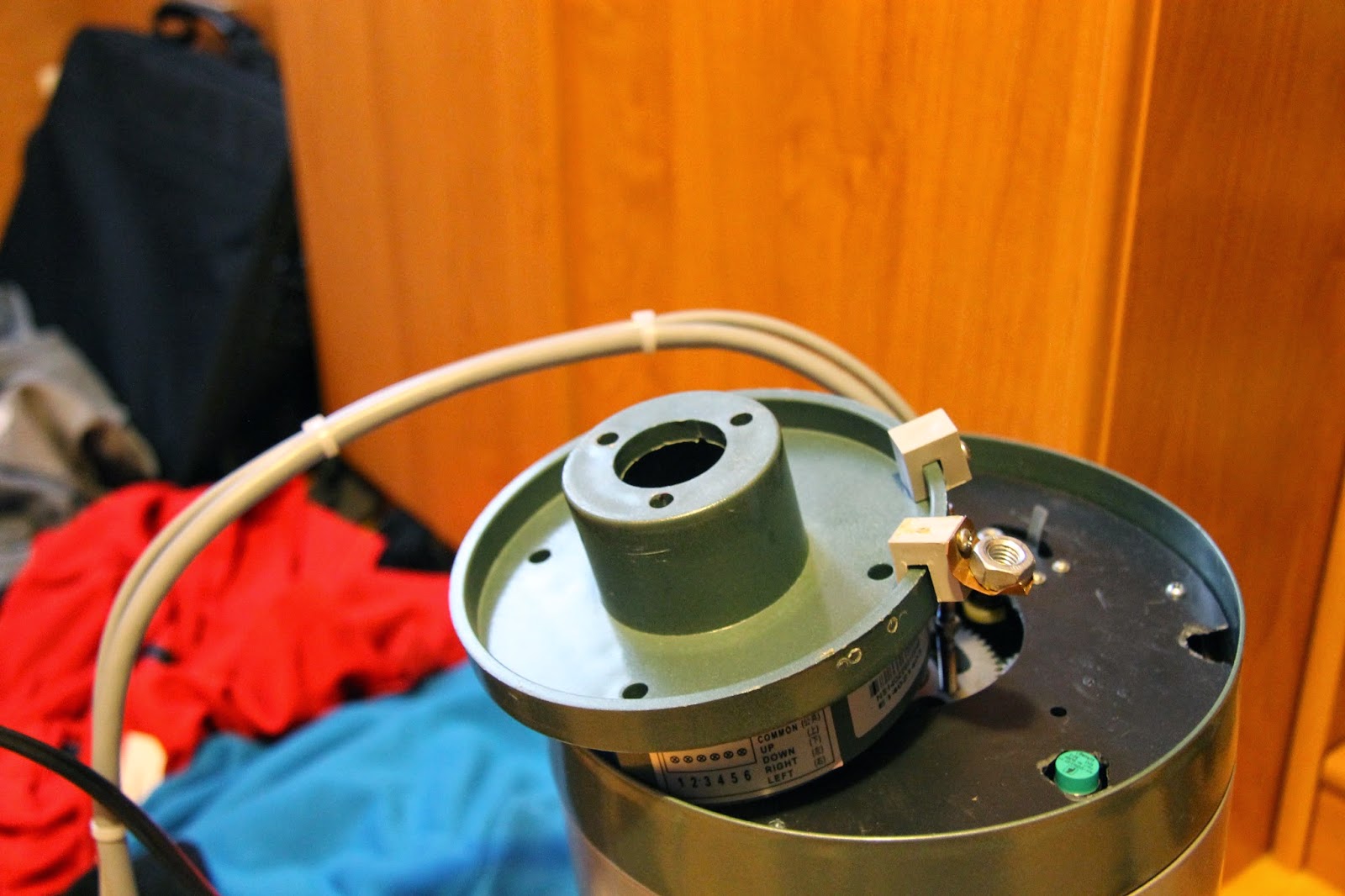
Holá hřídel

Úprava mezikusu

Šrouby prošroubované skrz uchycovací kolečko které už je přidělané na hřídely

Výsledek... o stoprocent lepší stav než předtím a snad chvilku vydrží. Tato sestava dílů je absolutně poddimenzovaná.
Další úprava spočívala v úpravě hlavního držáku celého rotátoru. Princip byl vysvětlen v předchozím příspěvku. Zde je finální provedení. Zlepší velice znatelné.






Poslední úprava spočívala v přidání RTC obvodu s vlastní baterií, teď už problém se ztrátou pojmu o čase nebude :)



Takže sesumírováno se udělalo toto:
Oprava uchycení kamery
Úprava držáku celého rotátoru
Výměna signalizační LED diody (shořela :)
Přidání RTC obvodu
Přidání spojek na kabely z důvodu jednodušší demontáže
Pořádné umytí čelního skla :)










































{kind=link}